
自动驾驶“端到端”到底是啥
发布时间:2024-09-19
阅读量:24685
分享至:
今年各车企在宣传自动驾驶技术的时候都会提到端到端,但什么是端到端呢?相信很多朋友都不清楚,今天就让我们来快速了解下自动驾驶中的端到端到底是什么。
端到端=抛弃规则
端到端的第一端简单来说就是感知端,像车辆的摄像头、激光雷达以及给各种车辆输入环境信息的都属于感知端。
第二端则是形式轨迹,简单来讲也就是控制端,车辆在收集到第一端的环境信息后,最重要做出决策,对车辆进行行驶轨迹控制,让车辆根据环境进行加减速、避让等。
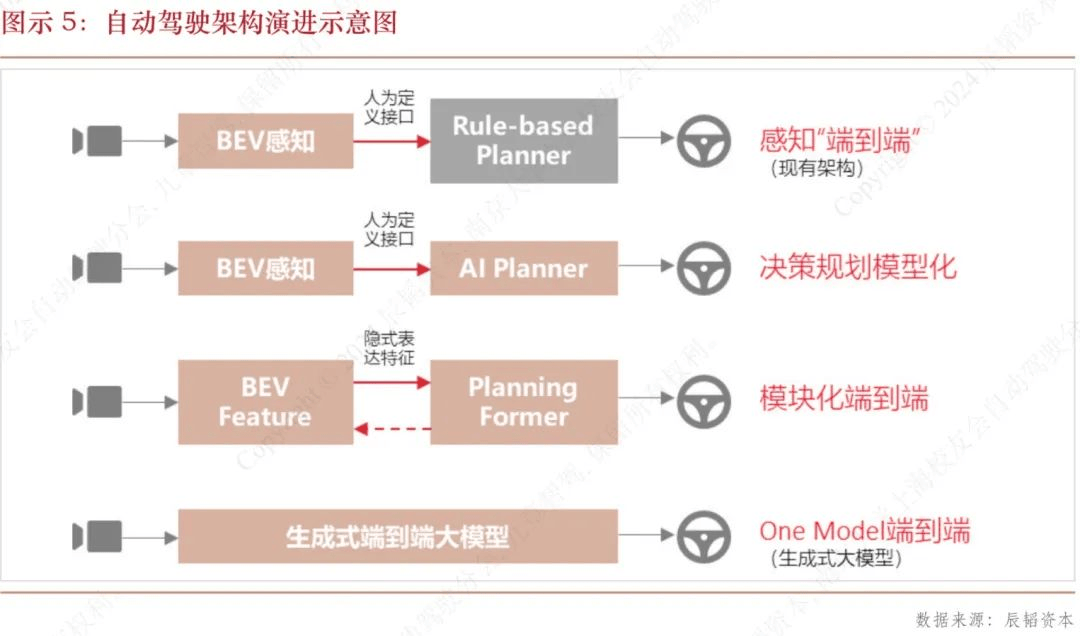
无论是过去还是现在,自动驾驶的底层操作逻辑始终没变,但是在过去自动驾驶架构分为环境感知、决策规划、控制执行三个模块。
第一个只能去感知,第二个只能在收集到感知信息后做选择、决策,第三个则是要在决策指令下进行控制车辆,三者相对独立,只能依靠固定的语言和格式进行传达信息,在处理上有些死板,特别是在决策层方面,其各种决策依靠的就是工程师提前设想和写下来的规则,如果出现没有提前写下来的规则,决策层可能就会出现决策错误,这样的方式相当死板,说实话也没啥技术含量。
另外,虽说现在信息传输非常快,但信息在三个模块之间传输始终是有延迟,并且有可能在信息传输的过程中导致数据缺失,从而带来一些安全隐患。

如今大家讲的端到端就是通过大模型将感知、规划和控制三个模块集成起来,消除三者之间的界限,让他们成为一体。
在将三者整合之后,工程师不再需要写规则告诉系统什么是车道线、红绿灯、交通规则,直接抛弃规则,运用大模型技术在大量的驾驶数据中学习人怎么开车,寻找驾驶的规律。相比之前工程师写下的规则,大模型学习之后能够更加迅速并且找到更加符合场景的应对策略,让车辆开起来更加像人开。
从目前的行业发展来看,端到端一定是未来车企们都要使用的自动驾驶技术,但这是不是自动驾驶的最佳解决方案仍是一个疑问。
热门文章